오늘은 stella를 실행시켜서 slam을 했다.
노트북과 라즈베리파이를 통신하여 ssh를 할 수 있었다.
내 처음 예상은 내가 알고 있는 실제 도면처럼 지도가 생성 될 줄 알았다.
그래서 잘 될 것 같은데 내가 해봐서 의미가 있을까 고민했었다. 근데 그건 완전 오산이었다..
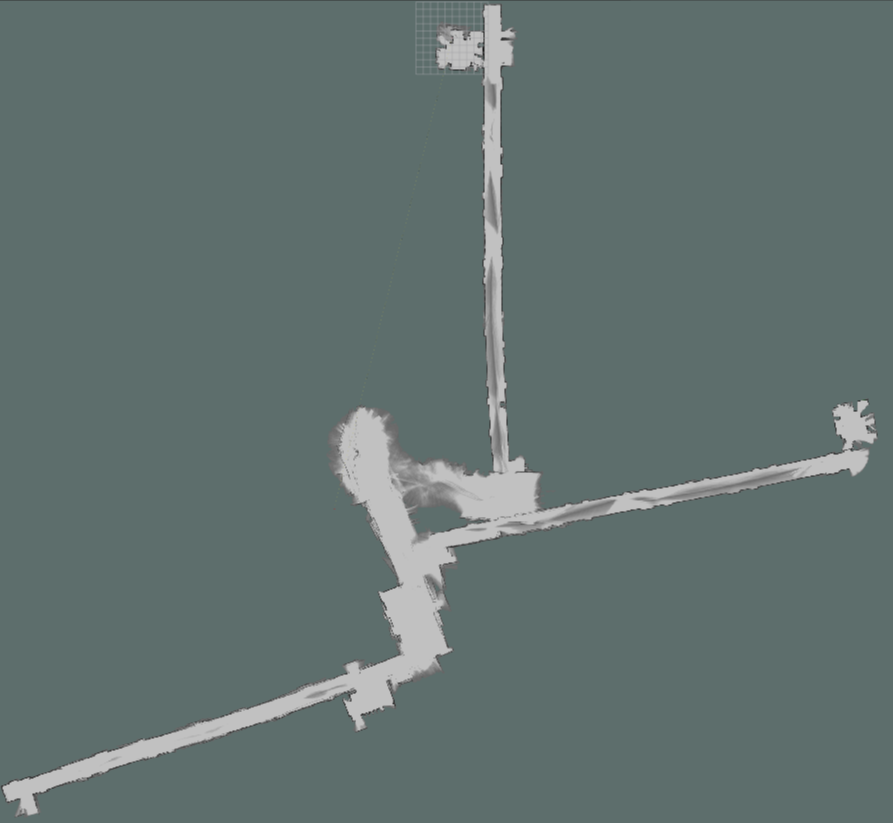
위 그림은 디지털관 2층을 slam 한 지도이고 실제 디지털관은 ㄷ자로 된 건물이다.
12시 방향에 있는 왼쪽 방이 201호이고 로봇이 출발한 지점이다.
12시 방향을 지나 7시 방향으로 이동한 후 / 7시 방향에서 12시 방향으로 돌아오는 길을 잘 못 그려서 3시 방향에 지도를 또 그렸다..
그리고 중간에 slam이 잘 안 된곳이 있는데 그 부분에서 내가 회전을 너무 빨리, 이상한 길로 가게 해서 잘 안 됐다..
지도를 보시고 교수님이 말씀해주시길, 라이다도 돌고 로봇도 돌는데 로봇이 돌 때 빨리 돌면 위치를 잘 못 찾아서 이상하게 지도가 생성된다고 하셨다.
나는 지도 완성하고 나서 이제 뭐하지,.. 다음엔 뭐해야하나 하고 있었는데
교수님께서 튜닝이나 실제 길과 같은 거리인지 등등 조언을 해주셨다..
역시 교수님은 똑똑하시다..

위 사진은 연구실을 대충 맵핑한 것이다.
rviz 메뉴? 뒤지면서 알게 됐는데 로봇의 이동 경로를 알려주는 것도 있었다ㅎㅎ
오류 사진은 못 찍었는데 처음 2층 맵핑 후에 지도를 저장하려고 했는데 시간이 초과됐다면서 오류가 났다..
그래서 캡쳐만 하고 연구실 맵핑후 지도 생성할 때는 잘 됐다.
구글링 해보니 다른 사람들도 그런것 같던데.. 한번 알아봐야겠다.
'공부' 카테고리의 다른 글
| turtlebot3 SLAM simulation 분석 (0) | 2022.04.05 |
|---|---|
| stella의 cartographer.launch.py 파일 분석 (0) | 2022.04.04 |
| 라즈베리파이 4b AP mode 활성화 (0) | 2022.01.12 |
| ROS 2 폴더 관련 용어 정리 (0) | 2022.01.05 |
| 우분투 20.04에 A3000u 와이파이 연결하기 (0) | 2022.01.04 |



